
Failure could take on many forms next week when NASA’s next-gen rover, Perseverance, reaches the surface of the Red Planet. Here’s what needs to go right — and how things could quickly go sideways — when Perseverance tries to make its much-anticipated landing.
For NASA, the entry, descent, and landing (EDL) of Perseverance on February 19 presents numerous potential points of failure. NASA has said that “hundreds of things have to go just right” for the rover to survive the seven minutes of terror. We can’t take a safe landing for granted: As NASA points out, only “about 40 per cent of the missions ever sent to Mars — by any space agency — have been successful.” Which, yikes.
In a nutshell, Perseverance will have to transition from speeds reaching 20,117 km per hour to a walking pace over the course of several minutes. What’s more, it’ll have to perform this autonomously, as it takes nearly 11 minutes for radio signals to reach Earth. To complicate matters, NASA is debuting two new technologies for the mission, both relating to the EDL phase and both unproven.
All three phases — entry, descent, and landing — present their own unique challenges.
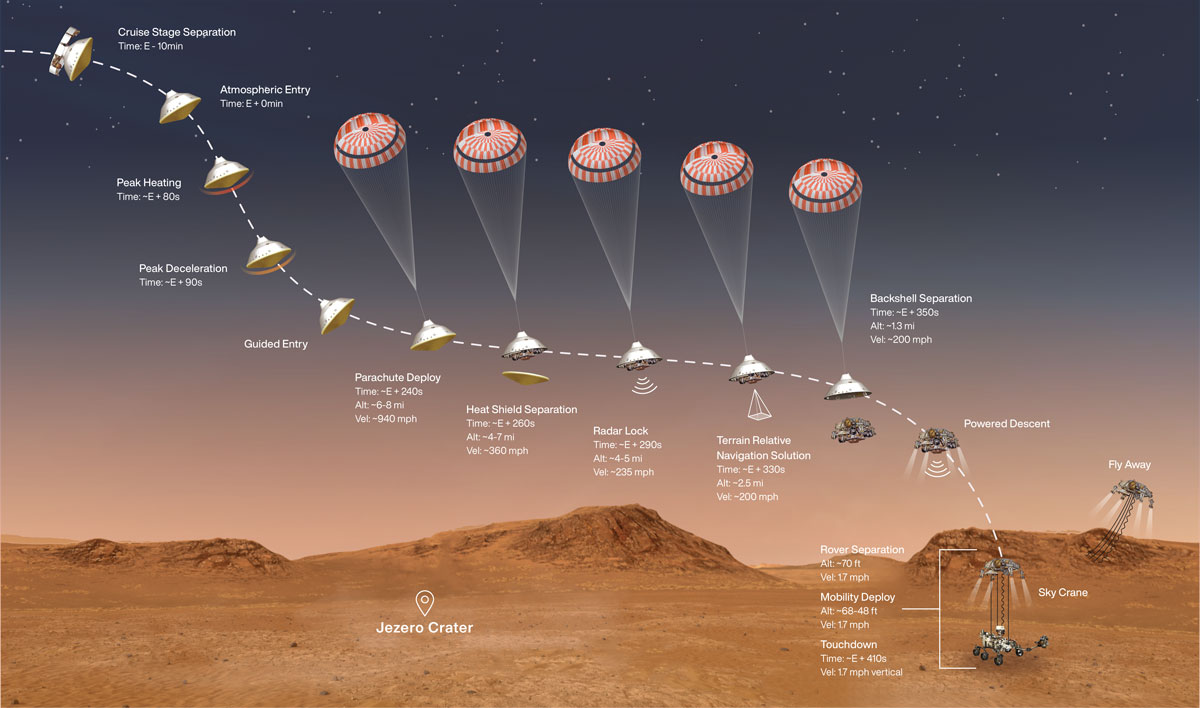
The rover, nestled inside the descent stage, will separate from the cruise stage, which, with its solar panels, radios, and fuel tanks, will no longer be required. Next, the spacecraft will have to orient itself such that its heat shield is facing forward, a task made possible by small thrusters located on the backshell. During atmospheric entry, the spacecraft’s heat shield will need to endure temperatures reaching 1,300 degrees Celsius. A structural failure at this stage would be catastrophic, ending the mission before it has a chance to get started.
Indeed, previous missions to the Red Planet have failed right at the Martian doorstep. In 1999, NASA’s Mars Climate Orbiter entered into an orbit that was way too low, causing the spacecraft to burn up in the atmosphere. The failure was eventually traced to a conversion error, in which imperial units of pound-seconds were not converted to the standard metric Newton-seconds. Hate it when that happens.
Should the descent stage survive atmospheric entry, it will still have to contend with variably dense air pockets that could steer it off course. A guided entry will be performed to avoid this problem, in which the descent stage will fire small thrusters to compensate.
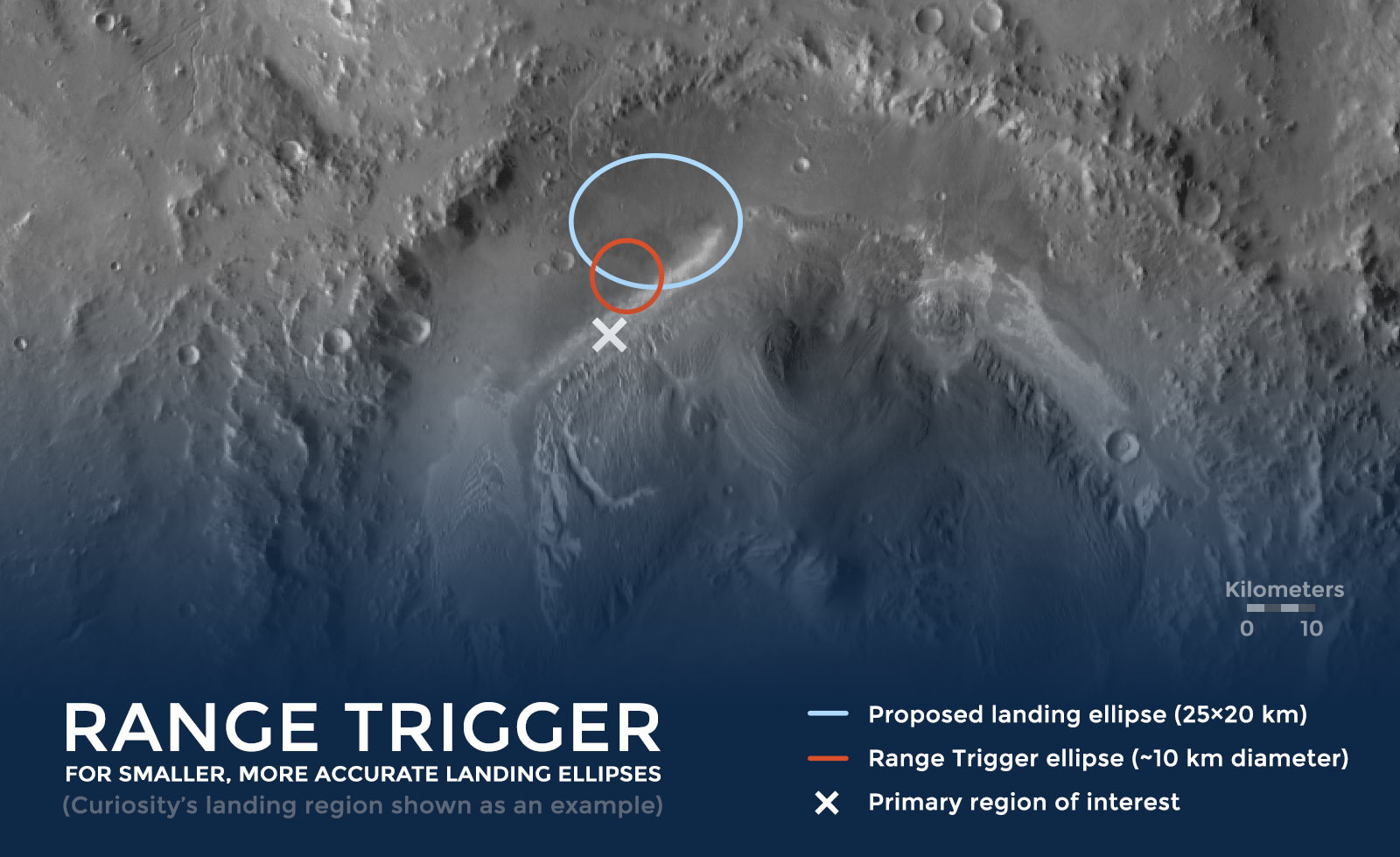
The unfurling of the 21.34 m-wide parachute is next. Should the parachute unfurl properly and not get tangled, the descent stage will abruptly decelerate to 1,600 km/h, which is still blazingly fast (remember, Mars has a super thin atmosphere). The deployment of this supersonic parachute will depend on an unproven new technology called Range Trigger, which will calculate the distance to the landing spot and trigger the parachute to deploy at just the right moment.
This is expected to happen approximately 240 seconds after atmospheric entry, when the descent stage is about 11 km above the surface. Perseverance will bid farewell to its heat shield around 20 seconds after the parachute has unfurled, introducing another potential point of failure.
This is a critical stage — one with regrettable historical precedents. During the failed landing of ESA’s Schiaparelli mission in 2016, the descent stage prematurely ejected the parachute and heat shield, the result of a software glitch. An onboard computer thought it was just a few feet off the ground, but in reality the descent stage was somewhere between 2-4 km above the surface. You can imagine what happened next. The doomed Schiaparelli lander was travelling at around 298 km per hour when it smashed into the Martian regolith.
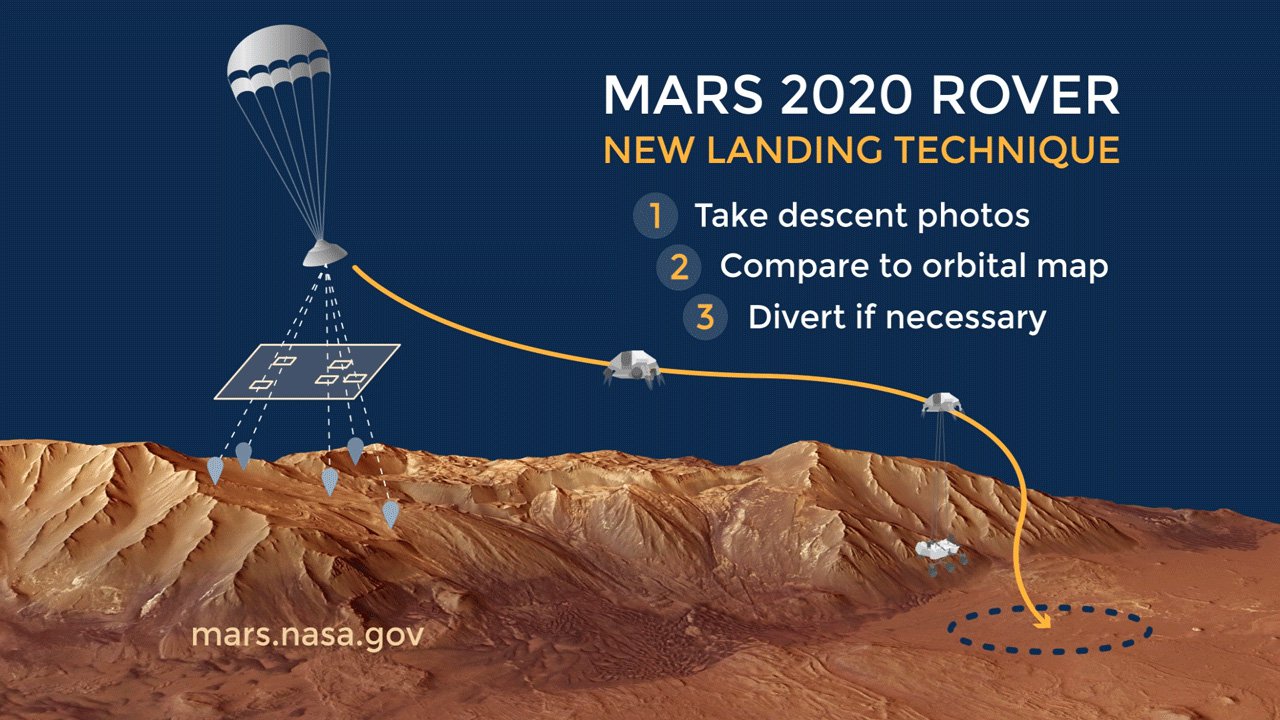
With the heat shield gone, and with the rover now finally exposed to the Martian atmosphere, another new technology will kick in, called Terrain-Relative Navigation. The proper execution of this tool will be critical, as the chosen landing spot, a crater, is quite dangerous.
“Jezero is 45 km wide, but within that expanse there are a lot of potential hazards the rover could encounter: hills, rock fields, dunes, the walls of the crater itself, to name just a few,” Andrew Johnson, principal robotics systems engineer at NASA’s Jet Propulsion Laboratory, said in a press release. “So, if you land on one of those hazards, it could be catastrophic to the whole mission.”
Here’s how NASA describes the new tool, which should allow the landing craft to determine its position relative to the surface with a degree of accuracy close to around 40 metres or less.
Terrain-Relative Navigation lets the rover make much more accurate estimates of its position relative to the ground during descent. […] Using images from Mars orbiters, the mission team creates a map of the landing site. The rover stores this map in its new computer “brain,” designed specifically to support Terrain-Relative Navigation. Descending on its parachute, the rover takes pictures of the fast-approaching surface. To figure out where it’s headed, the rover quickly compares the landmarks it sees in the images to its onboard map. Armed with the knowledge of where it’s headed, the rover searches another onboard map of safe landing zones to find the safest place it can reach. The rover can avoid dangerous ground up to about (335 metres) in diameter (about the size of three football fields end-to-end), by diverting itself toward safer ground.
The parachute should slow the descent stage down to about 322 km per hour, requiring one last step for slow down: powered descent with eight tiny retro-rockets. After ditching the parachute, the rover, still attached to its backshell, will cruise toward the surface from an initial height of 2,100 metres.

Some 12 seconds prior to touchdown, and at the very reasonable speed of 3 km per hour, it’ll be time for the skycrane manoeuvre. The backshell will lower the rover using three 20.12 metre-long cables, during which time the rover’s legs and wheels will move into their landing position. Perseverance, sensing an imminent landing, will let go of the cables, and the descent stage will zip off and crash — hopefully — far away.
Lots of moving parts, including some projectiles, obviously make this an extraordinarily complicated dance. The heat shield, parachute, and backshell all risk damaging or otherwise interfering with the landing and/or the performance of Perseverance.
Again, history provides another example of a mission failing at this point, namely NASA’s Mars Polar Lander, which, like the Mars Climate Orbiter, died in 1999 (not a great year for NASA). According to NASA, the “most probable cause of the failure was the generation of spurious signals when the lander’s legs deployed during the descent,” which “falsely indicated that the spacecraft had touched down on Mars when in fact it was still descending,” causing the “main engines [to] prematurely shut down,” resulting in the lander falling to the Martian surface.
Should anything go wrong during the landing, Swati Mohan will be among the first to know, as she’s the guidance, navigation, and control operations lead for the Mars 2020 mission. She’ll be at NASA mission control tracking the progress and health of the rover during the landing.
“Real life can always throw you curve balls. So, we’ll be monitoring everything during the cruise phase, checking power to the camera, making sure the data is flowing as expected,” said Mohan in a press release. “And once we get that signal from the rover that says, ‘I’ve landed and I’m on stable ground,’ then we can celebrate.”
[referenced id=”1233533″ url=”https://gizmodo.com.au/2020/07/your-guide-to-nasas-life-hunting-mars-rover-perseverance/” thumb=”https://gizmodo.com.au/wp-content/uploads/2020/07/24/zawni2mlwljmwhnly53s-300×169.jpg” title=”Your Guide to NASA’s Life-Hunting Mars Rover, Perseverance” excerpt=”NASA is set to launch its next rover to Mars on July 31, in what is certain to be an exciting new phase in humanity’s exploration of the Red Planet. Here’s what you’ll want to know about the Perseverance rover and why it’s our best bet yet for finding evidence…”]
The rover, though modelled on Curiosity, has many new features, including an array of cameras and the ability to peer beneath the surface with ground-penetrating radar. The rover will land at Jezero crater, where it will search for signs of ancient life. If life once existed on Mars, a spot like Jezero crater — a former lake and river delta — would’ve been an ideal place for microbes to hang out. In addition to this important astrobiological work, Perseverance will also study Martian weather and geology, deploy a small helicopter named Ingenuity, and collect samples for a future mission.
NASA will have a live stream of coverage of the landing, which is scheduled for February 19 at 7:30 a.m. AEDT. We’ll be watching and hoping for the best.