One of the stranger things about the coming of autonomous vehicles is the dawning realisation that, sometimes, they still may need to be driven by a human. And, at the same time, if a vehicle is primarily autonomous, you can no longer count on the fact that one of the passengers inside will actually know how to drive a car. So, this puts automakers in the strange position of designing interfaces to control an autonomous vehicle’s speed and direction without actually driving. That convoluted bit of thinking is how we get patents like this BMW “Steering handle of a Vehicle.”
The BMW obsessives over at i4Talk brought this patent to our attention, and I think it’s pretty fascinating, as it’s an attempt to re-design the fundamental way we control cars.
The robo-translated abstract of the setup describes it like this:
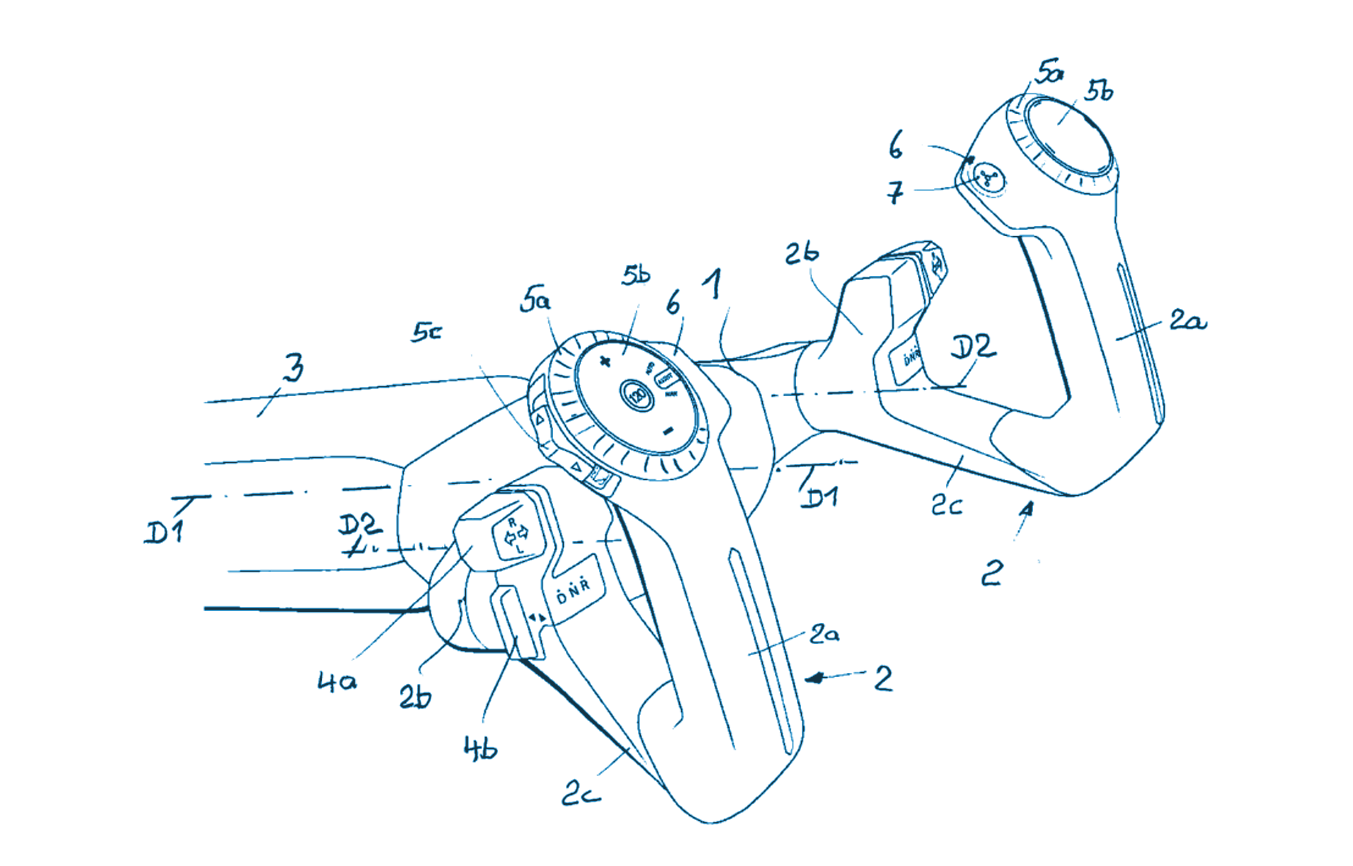
The invention relates to a steering handle of a vehicle with a support structure rotatably mounted about an axis of rotation, on which two angled shaped grip elements are provided rotatably relative to the support structure, each grip element having a leg designed to be at least partially gripped by a driver’s hand and furthermore apart from it Operating element arranged on the leg and operable by means of at least one finger of the gripping hand. The grip elements can have a second leg and a web connecting the two legs, each grip element being rotatably mounted on the support structure via the second leg. Operating elements can be provided on the second leg.
What’s interesting is that, based on the diagram, it looks like the car could potentially be controlled with either handle, or both. The speed seems to be set on that dial, and you can see the gearshift (4b) and turn indicators (4a) on the side of the handle.
I suspect the direction would be changed by rotating the handle (2) left or right, and braking by pulling back on the handle?
It’s essentially like a joystick control for the car, which has been attempted a number of times before, though the speed control via that dial (5a/5b) and what looks like a little up/down thumb control (5c), I think is new, at least to me.
I don’t think you’d have very precise control of the car with something like this, but, with some autonomous systems operating in parallel, it should be enough to guide the car, if not actually drive it, which should be enough for use cases like driving into a spot in an improvised parking lot in a field or something, or following a lead car to an off-road destination, or something similar.
I bet we’ll see a lot of interesting solutions to this guide-but-not-quite-drive problem in the near future before a standard is eventually — hopefully — agreed upon.