Inspired by bugs, Harvard’s Ambulatory Microrobot, or HAMR, can run, climb, make sharp turns and carry small payloads. In the latest upgrade to the system, HAMR has been endowed with the ability to swim, dive down from the surface, and walk underwater — no small task for an object as light as a paperclip.
Roboticists at Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) have added tweaks to HAMR which allows it swim on the surface of water, break surface tension and sink, and walk underwater.
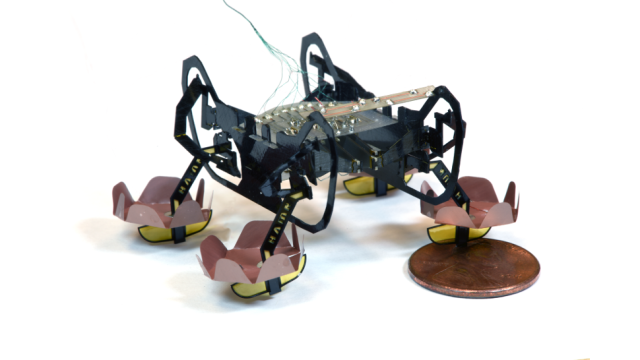
This microbot, weighing a mere 1.65g and capable of carrying 1.44g of cargo, can now explore both terrestrial and aquatic environments. Eventually, HAMR could be used as a scout in search and rescue operations, or for investigating dangerous or hard-to-reach environments. The details of this research can now be found in the science journal Nature.
To make HAMR swim, its creators provided it with multifunctional footpads, enabling surface tension as the bot paddles across the water. Its four pairs of asymmetric flaps lets it paddle on the surface, moving forward and turning, and with a swimming gait reminiscent of a diving beetle.
But swimming is easy; for HAMR’s developers, the real challenge was finding a way for the microbot to transition from a water skimmer to an underwater walker. The problem has to do with surface tension, and the difficulty in getting such a light object to pierce through the water surface.
“HAMR’s size is key to its performance,” said Neel Doshi, a graduate student at SEAS and co-author of the paper. “If it were much bigger, it would be challenging to support the robot with surface tension and if it were much smaller, the robot might not be able to generate enough force to break it.”
For a solution, the Harvard researchers turned to the power of small-scale physics, and a concept known as electrowetting. When a high voltage is applied to HAMR’s footpads, the angle of contact to the surface is altered, making it easier for the bot to break the water surface. This jolt lets HAMR slip through the surface and sink to the bottom.
The machine uses the same walking style as it does on dry land, so it retains its mobility. To prevent its electrical components from shorting underwater, HAMR is coated in Parylene, an environmentally friendly polymer.
An ongoing challenge, however, is getting HAMR out of the water. For an object as light as this, the surface tension can be intense, as it’s twice the weight of the robot. What’s more, the tremendous torque exerted during an exit attempt causes friction on the hind legs.
To resolve this, the SEAS researchers stiffened HAMR’s transmission and added soft pads to its front legs. This increased the machine’s payload capacity and redistributed friction during climbing. With these added tweaks, HAMR was able to walk up a ramp an escape from its aquatic confines.
Looking ahead, the researchers would like to find a way to get HAMR out of the water without the benefit of a ramp, and such a luxury won’t always be available in real-world settings. But they already have a couple of ideas, such as giving it gecko-like adhesives on its feet, or having it exit the water with jerky jumping motions. To be continued!
[Nature]