Because this is something that just happens every couple years, like locust infestations, we’re currently in the midst of a new round of flying-car hype. Uber is even having some big flying car event in Texas this week. Historically, every bit of flying-car hype proves to be bullshit. But it may not have to be; I think I have an idea about how flying cars could make sense, even it’s not exactly how Uber is imagining it.
Uber’s plan, as it seems to stand now, relies on the use of small, vertical-takeoff-and-land (VTOL) aircraft. Basically, just using tiny planes inside a city. I think this approach is too simplistic, and won’t be able to scale in any way that makes sense. I think I have a better idea.
Now, your gut reaction may be to not like it because the fundamental, romantic appeal of flying cars has always been the incredible independence and freedom of them. Flying cars, going all the way back to the first experiments in the late ’20s and through the era of flying Pintos and into today, have always conjured up images of living on inaccessible islands and flying into work every day, and jaunting off to wherever you’d like, looking contemptuously at the ground and those miserable bastards stuck in traffic.

The truth is, though, that’s just not going to work. If we want flying cars to happen, we have to get rid of the concept of just translating personal, private cars into the air. The logistics and traffic management of large numbers of independent flying cars is just too inefficient and difficult to manage, and the issues arising from mechanical failure or driver/pilot error are too unforgiving.
We need a new way to conceptualize the whole idea, and the way that works isn’t exactly sexy: flying (and driving) buses.
Buses, like most public transportation, isn’t nearly as exciting as your own private car, but it makes more sense in this context. Plus flying has a huge advantage over every other public transportation network out there, and that advantage is the key to why flying buses actually make sense: the routes can be dynamic, optimised, and changeable on demand.
There’s no massive, city-wide infrastructure cost for flying vehicles. There’s no roads to build, no tracks to lay, no tunnels to dig. I’m imagining a system of flying/driving vehicles that use a resource we have plenty of — computing power — to constantly adapt and change to meet demand and traffic.
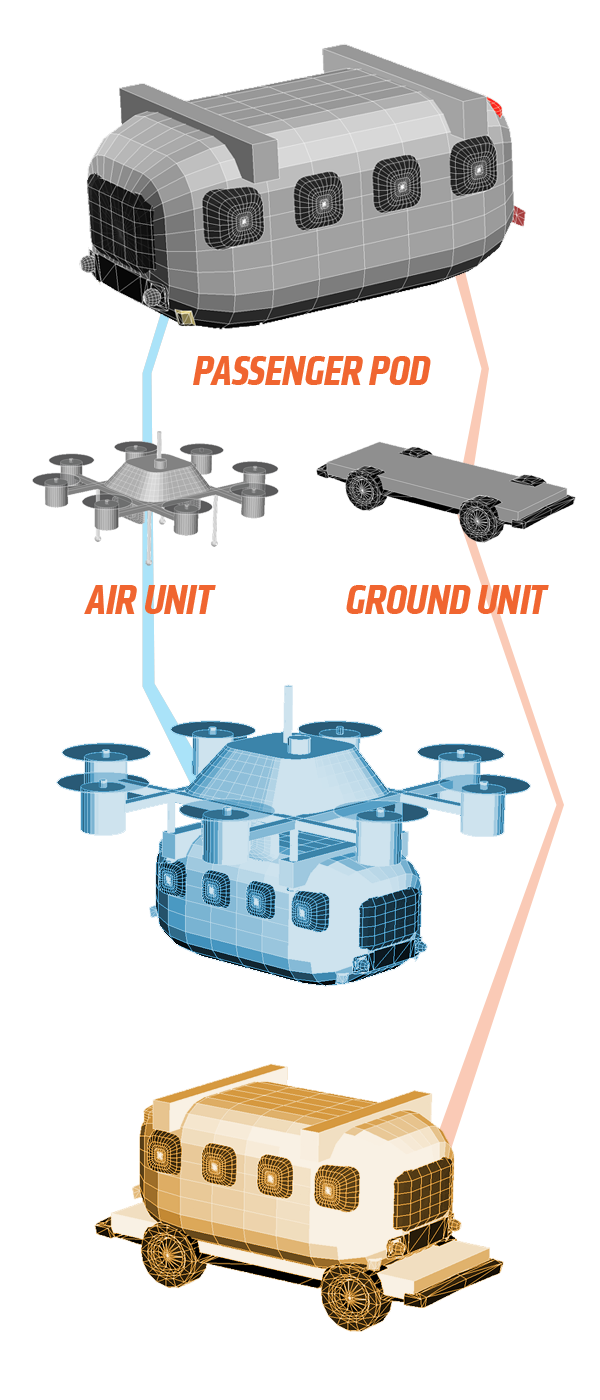
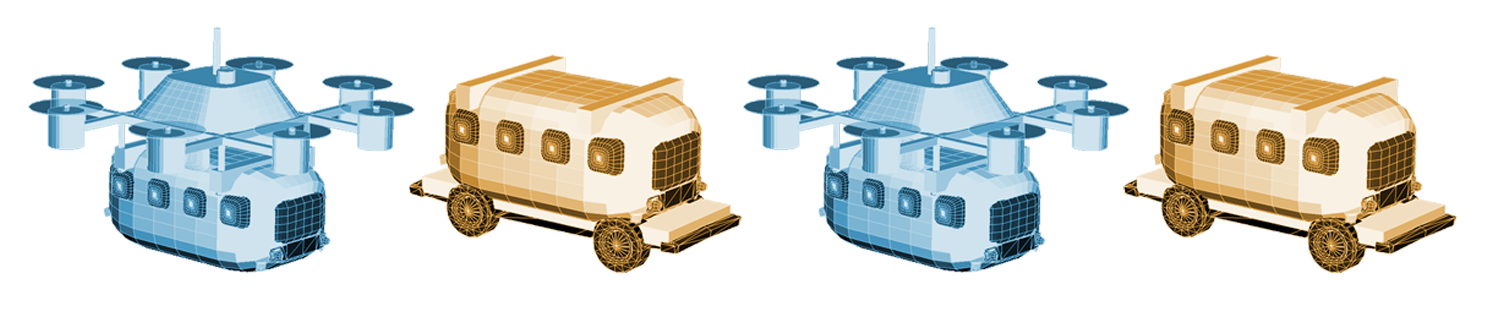
First, we have the basic vehicles, which consist of three main components: a passenger pod, a VTOL air unit, and a street-going wheeled ground unit. The passenger pod can dock with either the air unit or the ground unit as needed.
The air unit and ground unit are autonomously controlled, in constant communication with a central traffic controlling and route managing system. A human pilot/driver can be on board to act as an emergency safety backup, but would not be able to fly the vehicle in normal operation.
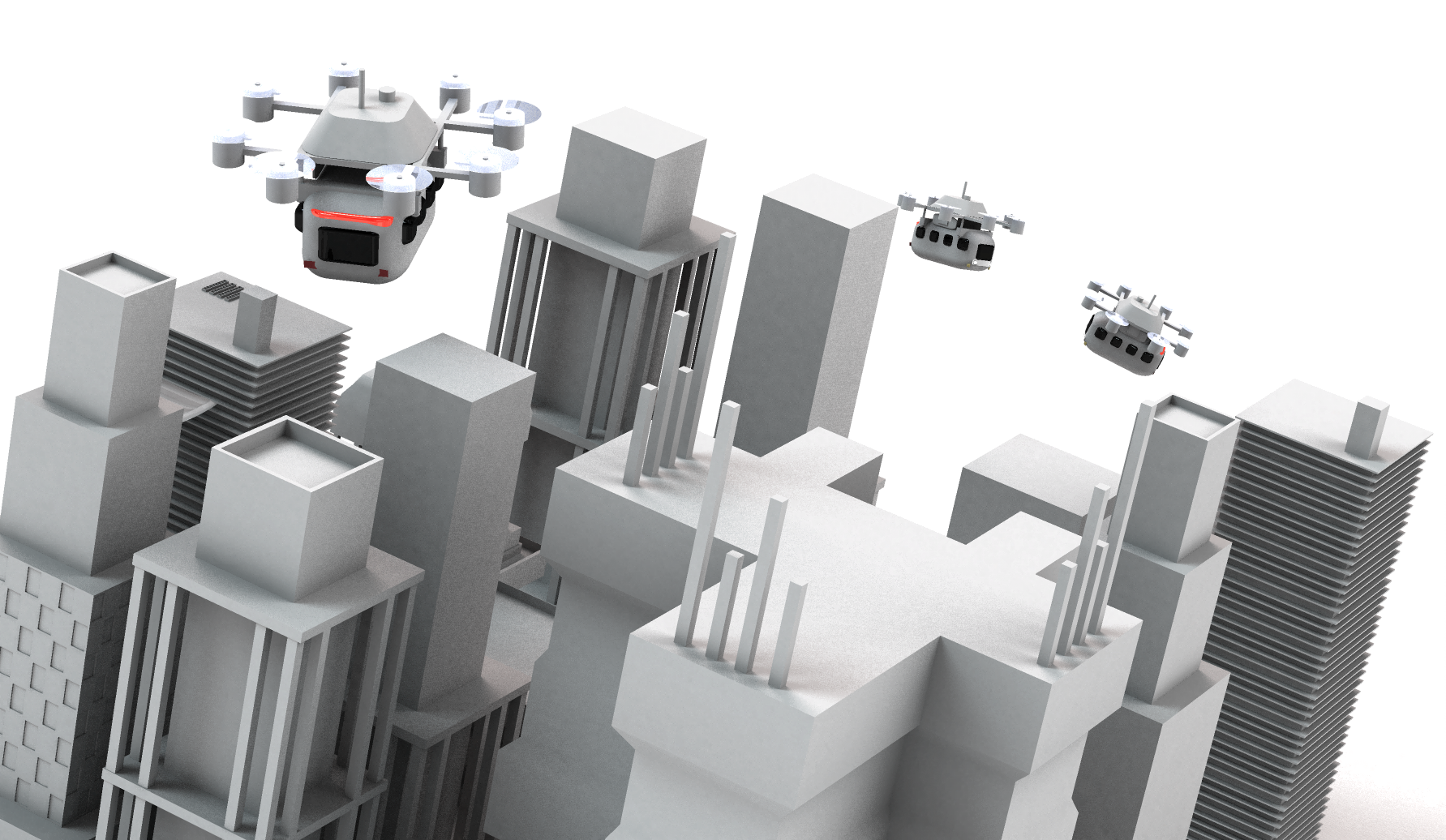
Oh, and the airspace for the flying would be in a zone just above skyscraper-level in a given city, well below the altitude of commercial (and private) aircraft. The FAA can figure out the parameters of that.
These vehicles can be powered by combustion motors or can be electric; since there seems to be a desire for systems like these to be electric (reduced pollution, noise, efficiency advantages) let’s consider them to be electric for now. Both vehicles can drive or fly with or without the passenger pod. Moving without the passenger pod will only need to happen for purposes of moving resources/vehicles from station to station or for recharging.
There are two basic types of stations in this transportation system, rooftop and ground-level. Rooftop stations will be more common in large, dense cities, and will only have air units available. The distance between stations and number of stations will be dependent on the range of the air units.
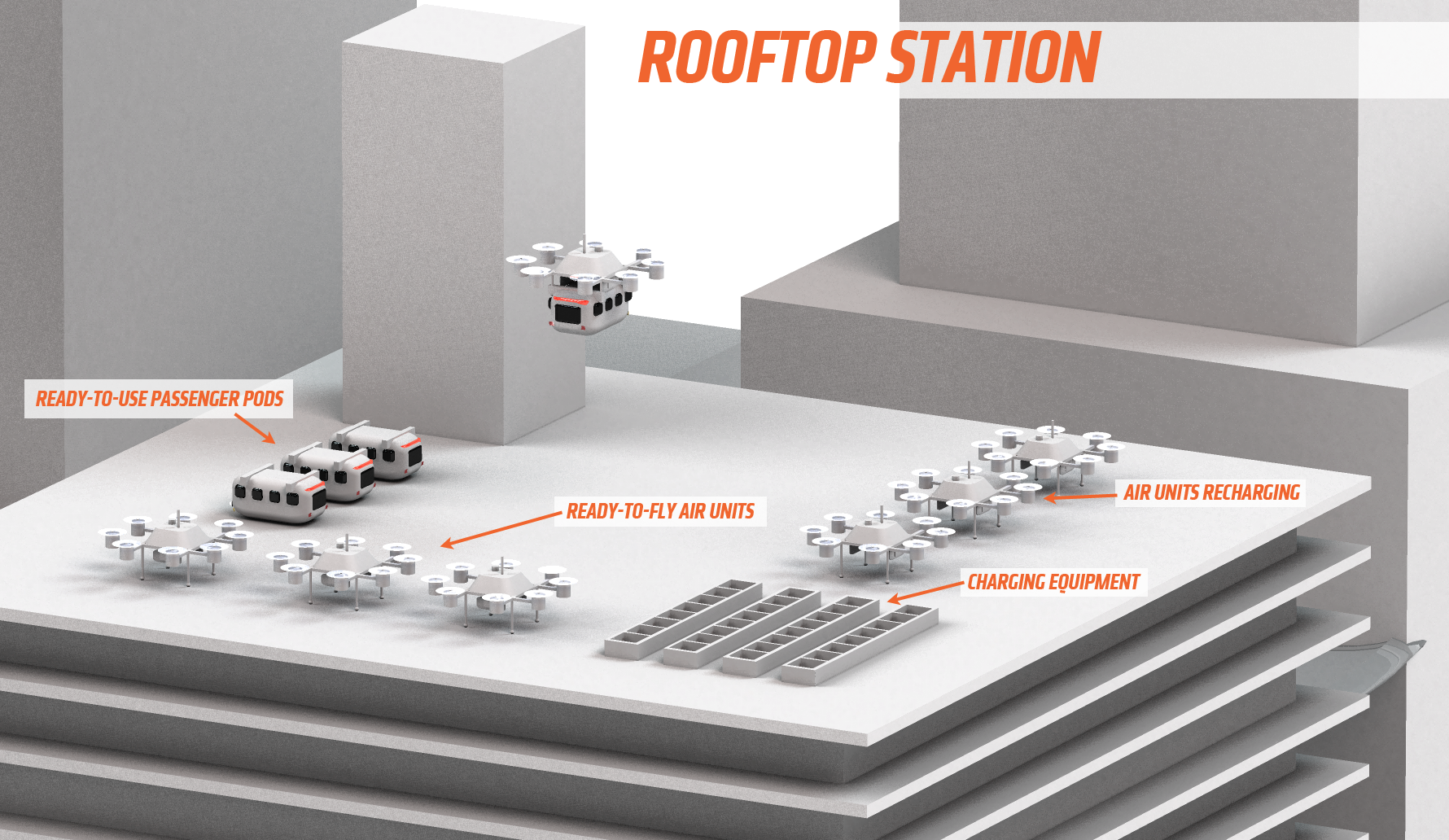
Since the worst thing that can happen to a flying vehicle is to plummet out of the sky, there will be a lot of buffer room, with the distance between stations (rooftop or ground) taking up no more than 50 per cent of the range of the air unit.
Every time an air unit lands at a station, it hands off its passenger pod to a full-charged air unit, and then plugs itself in for recharging. Every station must have a fully-charged air unit ready to go to replace one that’s landed. This way, we can eliminate any down time for recharging and guarantee every air unit aloft has plenty of power reserve.
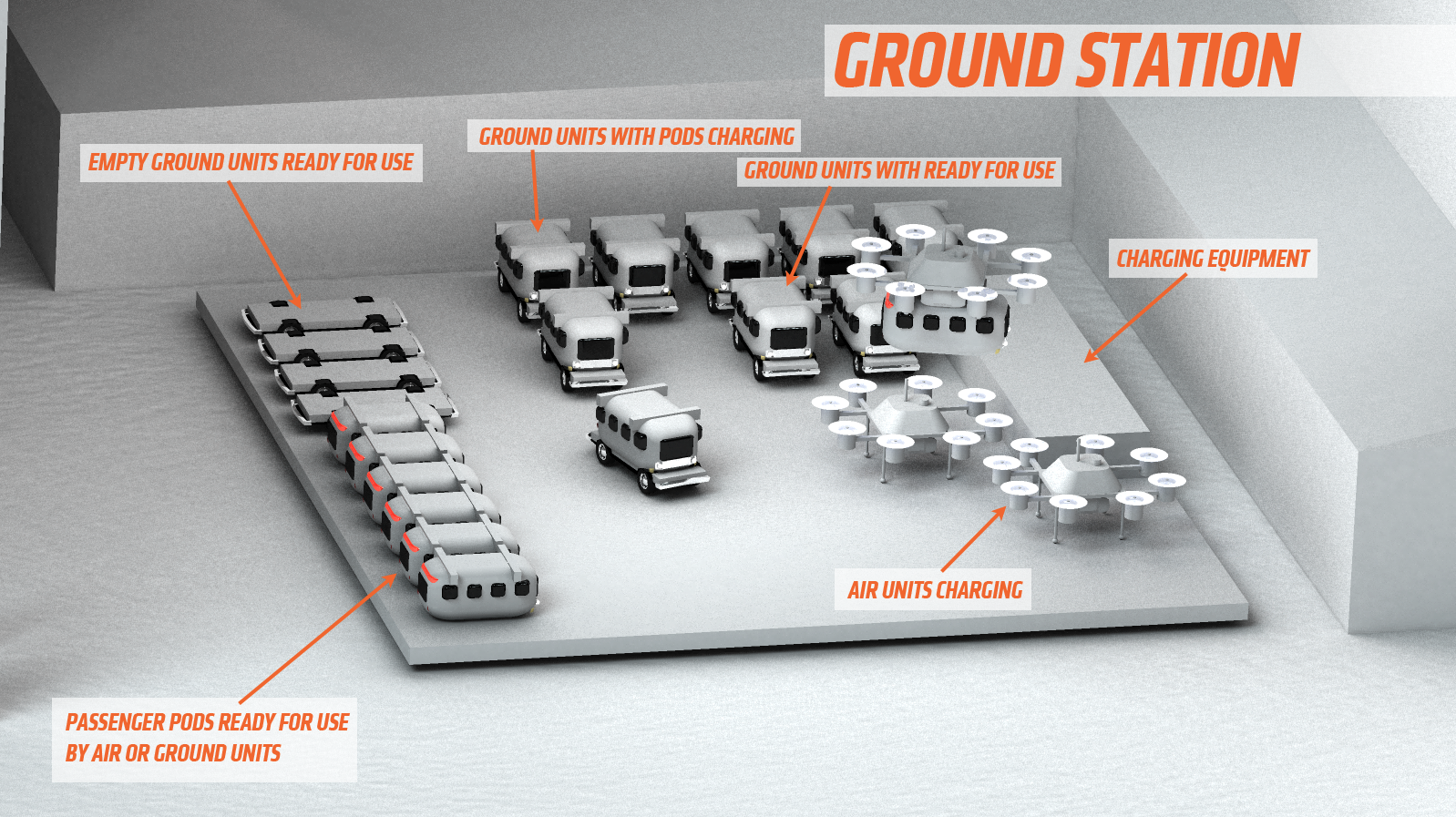
Ground stations have wheeled chassis that take the passenger pod and drive on the road, like a conventional bus. The ground-driving portion is used to get the rider to their final destination, or to pick up a rider to start their trip. Maybe some rooftop stations will have elevator systems to bring a passenger pod down to ground units at the base of a building? That would be cool.
So, those are the basic elements: a passenger pod, air unit, ground unit, and stations, either on rooftops or at ground level. In any given city, there would be a mix of these stations, the number of which and the number of vehicles based on geographic size and volume of passengers.
Here’s how I’m picturing the overall system working: from an app on your phone, a rider tells the system where they want to go. This will be an actual final destination, not just a close-by station.
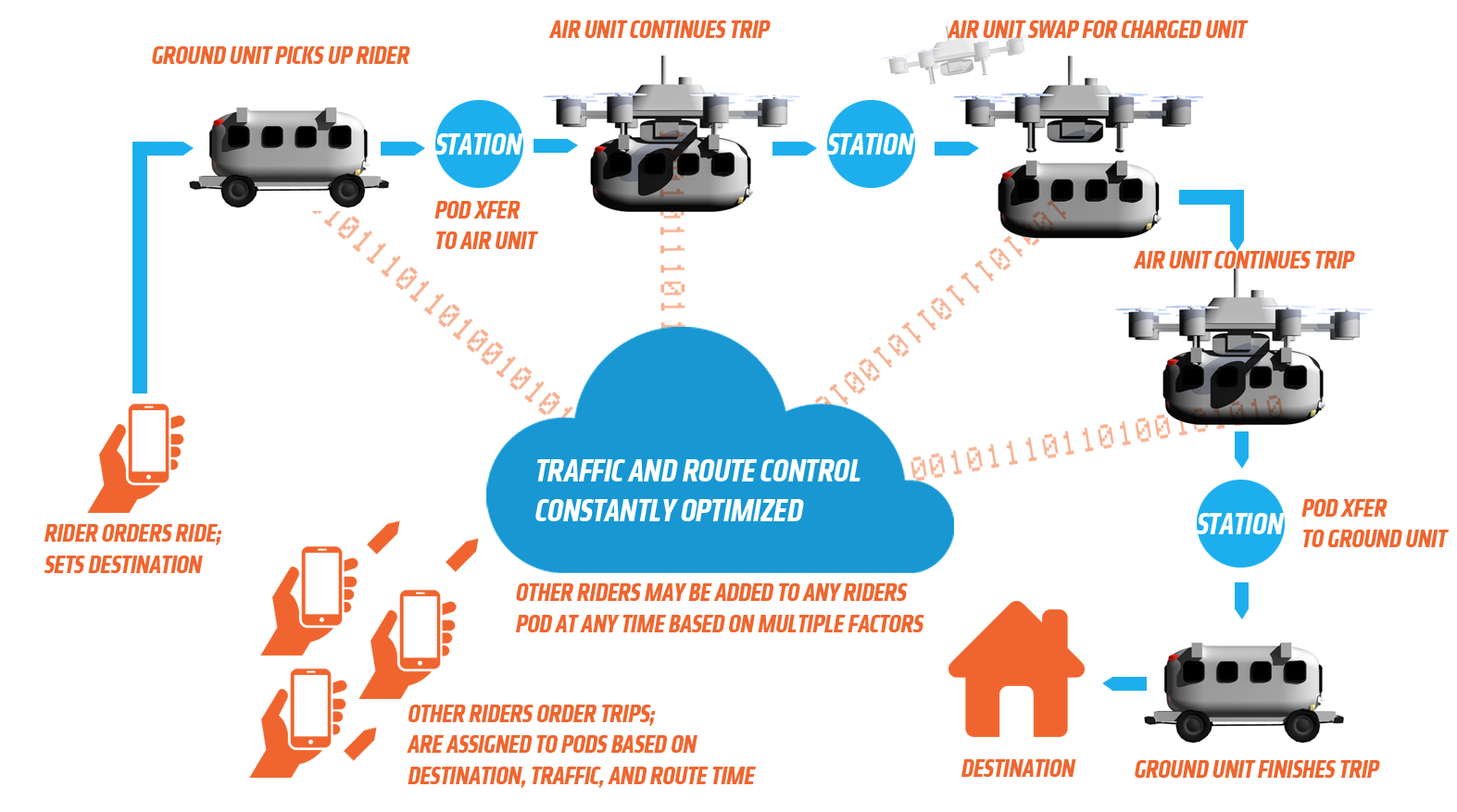
The system’s servers, off in the cloud somewhere, evaluate the entire network, its current load, the locations of all assets in the air and ground, and the location of stations to find the best route. The rider’s current location is evaluated, and if they’re in easy walking distance of a station, they will be instructed to go there. If not, one of the ground units with available space and on a path that makes sense will be sent to collect the rider.
The passenger pod that a rider enters will be chosen based on the destinations of the other riders inside. Let’s say that an average passenger pod has between eight and 10 seats. If a rider is the first one in the pod, that destination will be what other rider’s pod assignments are based on. As more riders enter the pod, the destinations will be ‘averaged’ so that an optimal route for getting everyone where they want to go as quickly as possible will be computed.
Routes can be altered dynamically at any point, with the pod communicating to an overall traffic control program managing other vehicular traffic, compensating for technical issues, maintaining safety, and optimising travel time. This won’t be easy, but it is exactly the kind of thing computers are very good at.
There will be a maximum acceptable transit time for every rider. A pod will only pick up new passengers if it does not cause any current passengers to have a longer travel time, even if that means running a pod at less than full capacity.
Ideally, the system should be able to optimise routes so that a passenger will never have to change to a different pod. The pod may be flying part of the time, then driving, then flying again, or whatever, but, ideally, a rider gets in one pod and gets out of the same pod at their destination.
The maximum travel time will vary based on how robust the overall system is. In a dense city with many stations and lots of air and ground units, travel time should be short, since there’s enough resources to allocate to the most efficient routes possible.
In cities with a larger geographic area, smaller population, and less stations and vehicles, minimum travel time will, of course, be longer. The good news is that as they system grows, it can be expanded dramatically with just more vehicles and a few more stations, far easier than existing systems like subways that require massive infrastructure projects for new lines.
In a way, the system is sort of like those shared airport shuttle vans, in that there’s a small group of people on a vehicle, the vehicle picks up people at any location, and an optimal route is generated.
The difference here is that massive computing power is used to constantly change and optimise routes, and those routes, being in the air, can take the most efficient path. As each passenger leaves the pod and new ones enter, the optimal travel path is dynamically re-worked and optimised.
So, what we end up with is a door-to-door public transportation system with an ever-malleable route map, and the riders will never have to know anything about those routes. It would function like a shared cab — enter a final destination, get picked up (or walk to a station, whatever takes less time) ride, fly, whatever, and then you get out at your goal. It could be that easy.
Flying allows for the full, three-dimensional freedom of routes, and ground transport allows for door-to-door access. A massive amount of constant computation will be needed to make this work, but I believe that such a system is absolutely possible.
There wouldn’t be a bunch of distracted, unqualified pilots in the sky, nor even a bunch of low-capacity autonomous aircraft that spend most of their time unused. This would be an air-and-ground transportation network, almost like a computer network, moving packets around via the most efficient possible path. These packets would be people, not data, but the fundamental idea is the same. It’s a network, with managed traffic and clear rules, running and adapting automatically to the demands of load and the environment.
We can have flying cars, just not our own. To make it work, we’ll have to be part of a larger system, but that’s ok. Just be sure to at least occasionally make your final destination the garage you keep your old, manual, vintage car so you can go for a nice, inefficient, freedom-filled drive.