Given their size and limited brain power, ants have an uncanny ability to find their way home after lengthy foraging excursions. To figure out how they do it, scientists from Germany have developed an innovative, but surprisingly simple spherical ant treadmill made from styrofoam.
Cataglyphis desert ants, who dwell in Saharan salt pans, have it tough. They’re forced to navigate themselves back home across a flat, bare and hostile environment. Incredibly, these ants almost always succeed in this task, often taking the most direct route home possible.
To get a handle on these uncanny orientation skills so that we can one day exploit them to build better robots, a research team from the University of Freiburg, led by Matthias Wittlinger, built a treadmill specifically for ants. The spherical device consists of a simple Styrofoam ball, which is suspended by a blowing air stream. To an ant placed atop the ball, the experience is not too far removed from its natural desert surroundings, or so the researchers say. The ant might feel differently if it could talk.
Even though the ant is tethered to the device, the spherical treadmill allows it to walk using its natural gait, even when it has to quickly move and change direction. The system is equipped with optical sensors, similar to the ones used in a computer mouse. As the researchers report in the Journal of Experimental Biology, the ants go about their navigational business as usual, allowing the scientists to accurately measure walking speed and angular orientation.

“This gives us almost unlimited possibilities to test the mechanisms and neural basis of our model animal’s spatial orientation and navigation in the laboratory,” noted Wittlinger in a statement. “We can place the ants in a virtual world and incorporate certain changes into it to see how they react.”
When Cataglyphis ants leave the nest, they use an internal navigation system that measures the distance they have travelled according to how many steps they have taken. The Sun is used for orientation, and a built-in clock accounts for their movements over time. The spherical treadmill allowed the researchers to study this insectoid orientation scheme in way that’s reminiscent of how they do it in the wild.
Prior to placing an ant on the treadmill, the researchers allowed their test subjects to leave their nests — both in field and lab settings — in search of food. Typically Cataglyphis desert ants travel a maximum distance of about 10m, storing critical information about their journey along the way. When an ant reached the endpoint of a foraging expedition, just prior to heading back home, the scientists snatched it and placed it on the treadmill. Like the script-driven automatons that they are, the ants tried to navigate home based on their newly constructed internal map (remember, even though it’s obvious to us that the ants are on a futile journey to nowhere, the ants are oblivious to their plight, going about their travels as usual).
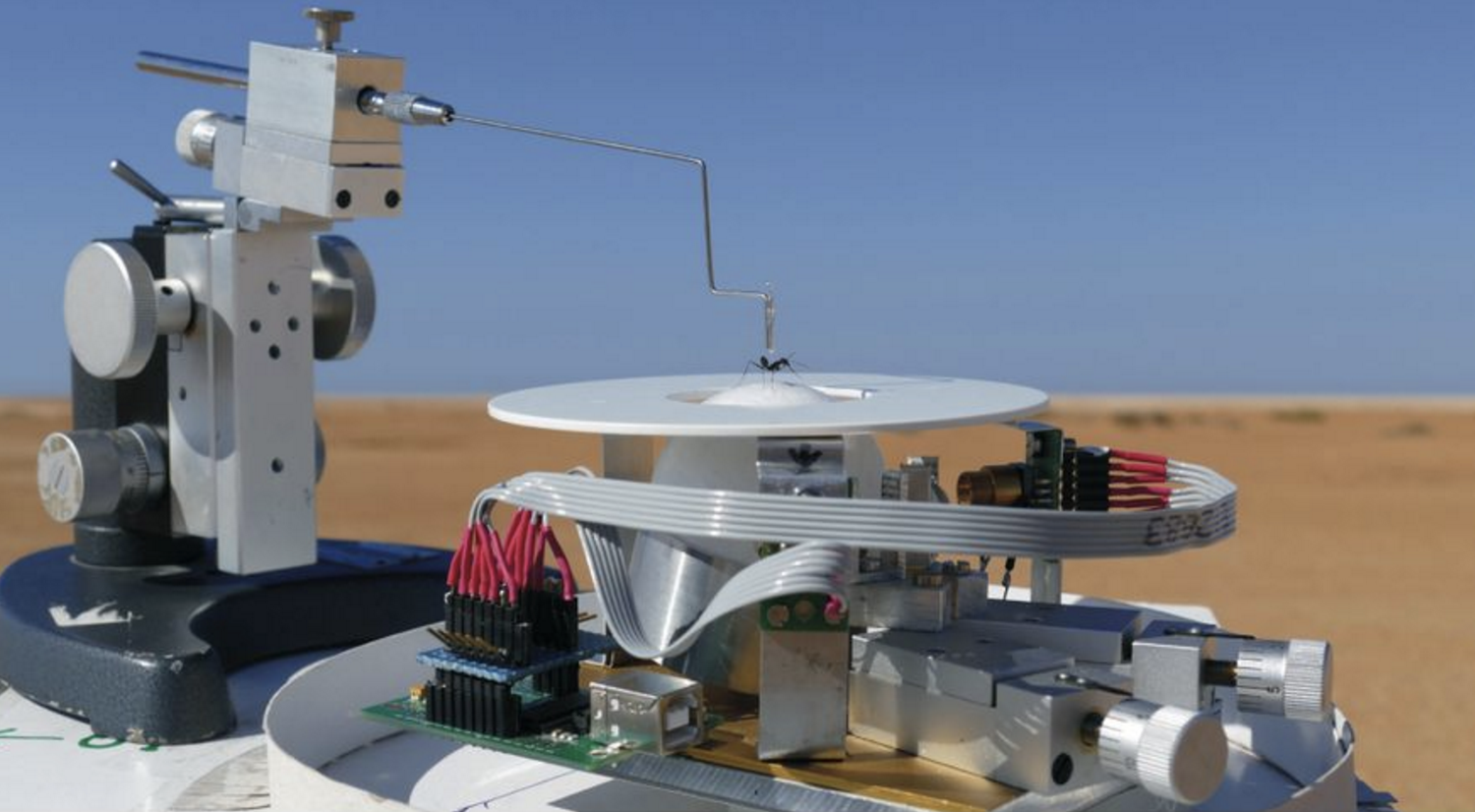
Image: Hansjürgen Dahmen et al., 2017
Wittlinger and his team recorded how the ants headed back to their nest, and used this information to figure out how the return leg of the journey was accomplished so quickly. Once the ant arrived in the general vicinity of its nest, it switched into search mode, taking a meandering path that normally allowed it to find its home base. Importantly, patterns observed in the lab matched well with real world conditions — fast initial journey, meandering pace near the location of the nest — giving scientists confidence in their custom-built treadmill.
Looking ahead, the researchers would like to measure the brain signals of the ants as they travel. Eventually, this sort of research could result in effective navigational software for robotic insects, including artificial pollinators.