
There are holes in Curiosity wheels. There have always been holes — the rover landed with twelve holes deliberately machined in each wheel to aid in rover navigation. But there are new holes now: punctures, fissures, and ghastly tears.
The holes in Curiosity’s wheels have become a major concern to the mission, affecting every day of mission operations and the choice of path to Mount Sharp. Yet mission managers say that, so far, the condition of the wheels has no effect on the rover’s ability to traverse Martian terrain. If the holes are not causing problems, why the rerouting? Is the wheel damage a big deal or not?
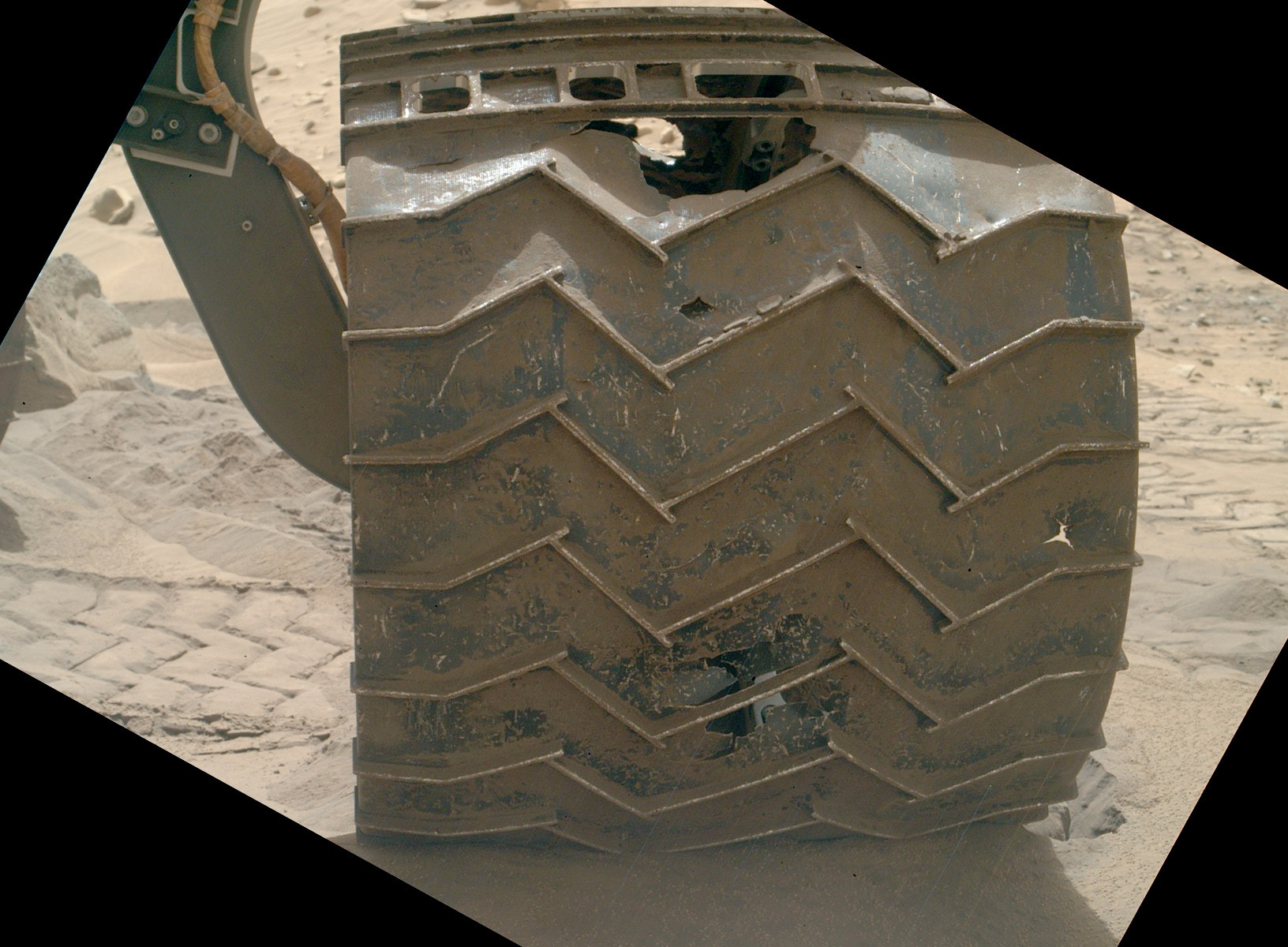
NASA / JPL / MSSS / Emily Lakdawalla
I’ve been asked a lot of questions about the wheels since we noticed the first rip on sol 411, and I’ve received many requests for posts specifically addressing the wheel damage problem. At first, I dismissed people’s concerns, because the mission seemed unconcerned. But within a few months, the mission started becoming more alarmed by a sudden increase in the rate of damage. They had to form a “Tiger Team” to understand what was causing the more-than-anticipated damage and to determine how best to address the problem. Their work isn’t over, but the Tiger Team had a major review meeting on August 7, and last week I had a lengthy conversation with Project Manager Jim Erickson about the mission’s status. I’m glad to finally be able to address your questions about the wheels.
In this post I’m setting out to answer six frequently-asked questions:
- What is the nature of the damage to the wheels?
- What is causing the damage to the wheels?
- What is the expected lifetime of the wheels, and how does that life end?
- How can they prolong the life of the wheels?
- Why didn’t they foresee this problem?
- What are they changing for Mars 2020?
The short version of the story: wheel damage is a serious issue, but it does not presently limit the capability of the rover. The mission now understands the problem and can partially mitigate it. The rover will be able to complete its extended mission, and will likely be able to go on to more mission extensions. The major effects of the wheel damage problem are to slow the progress of Curiosity and to limit the paths the mission can choose to explore.
Introduction to Curiosity’s wheels and suspension system
Below is a photo of a flight wheel — that is, one of the six that’s sitting on Mars today. Each wheel tire was machined from a single block of aluminium. It is 50 centimeters in diameter and 40 centimeters wide. It has grousers (treads) that protude 7.5 millimeters from the wheel skin. Grousers are spaced 15 degrees apart. Unlike Spirit and Opportunity, the grousers are not straight; they have chevron features designed to prevent sideways slip.
The skin of the wheel is 0.75 millimeters thick — the absolute thinnest that could be machined. The grousers provide structural strength; the skin is for floating the rover atop loose sand. There is a slight crown to the wheel to make it more robust to the moment of touchdown on Mars (remember that the rover landed on its wheels, with no lander underneath them). There is a vertical rim on each edge of the wheel, again for structural strength. There is another, double rim located about one-third of the way into the tire, the structural stiffener to which the wheel flexures (spokes) are attached. One section of the tire has a set of odometry marker holes drilled into it, which provide a way for the rover’s navigational software to measure its driving progress across soft surfaces by photographing the tracks. For fun, these holes spell out “J P L” in Morse code.
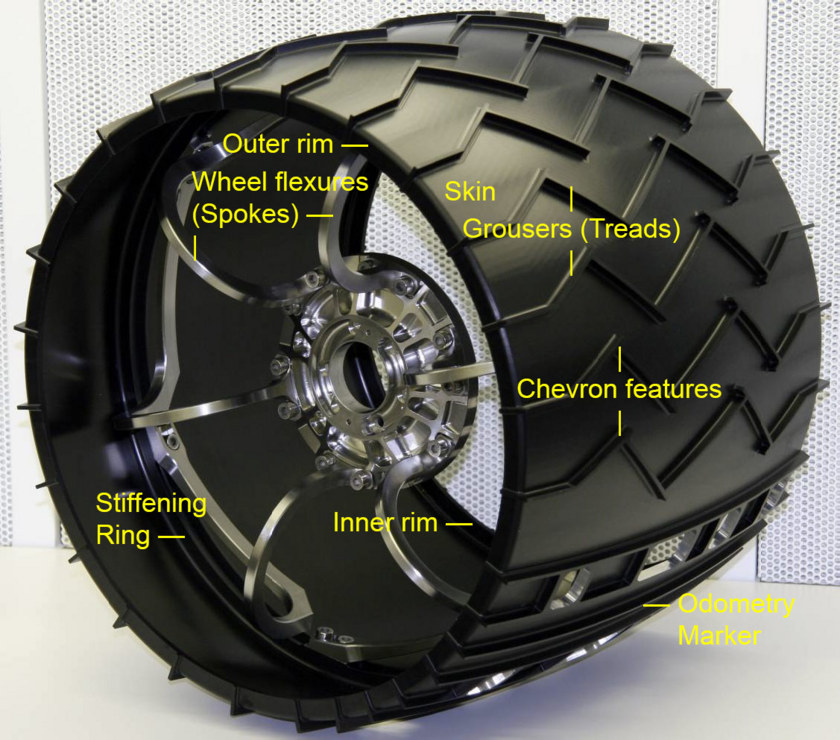
NASA / JPL / Emily Lakdawalla
A Curiosity wheel before it was attached to the rover and flown to Mars, labelled with all of its component parts.
Here are the parts of the rocker-bogie suspension system. There are only three places where the suspension system is connected to the rover body: a pivot on each side and one on top (in the middle of the differential bar, which connects the two sides to each other). The long arm is called the rocker and is connected to the body at the pivot. On the front end of the rocker is the front wheel. On the back end of the rocker is a second arm called the bogie. The bogie carries the middle and rear wheels. A rocker-bogie suspension system keeps the rover body relatively level even when the wheels are climbing obstacles equal to their heights. The lengths of the rockers and bogies are chosen in part to distribute the weight of the rover evenly across all six wheels. Here is a great explainer on how the rocker-bogie suspension system works.
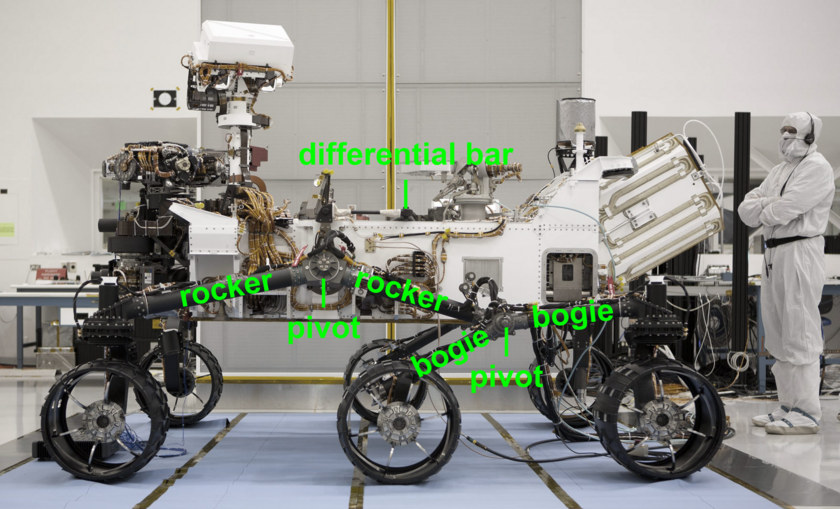
NASA / JPL / Emily Lakdawalla
Curiosity’s wheels are supported by a “rocker-bogie suspension system.” Each side has two arms (a rocker and a bogie) that can pivot, connected to each other through a differential bar and pivot on top of the rover. When one rocker tilts in one direction, the linkage through the differential causes the other rocker to tilt in the opposite director, keeping the rover body relatively level even when the wheels are climbing large obstacles.
The system was designed to achieve an expected prime mission total drive distance of 10 to 20 kilometers. The Curiosity wheels were sized to produce the same ground pressure on Mars that the Mars Exploration Rover wheels do. In extensive testing on Earth using a Mars-weight rover, engineers found the system to be capable of surviving intense touchdown scenarios. Traverse testing focused on the mobility system’s ability to drive without slipping. It can climb slopes up to 22 degrees on smooth bedrock, but experiences substantial slip at slopes above 10 degrees in cohesionless sand. In desert testing, JPL found that the larger wheels of the Curiosity mobility system handle better on sand than the Mars Exploration Rover wheels do.
1. What is the nature of the damage to the wheels?
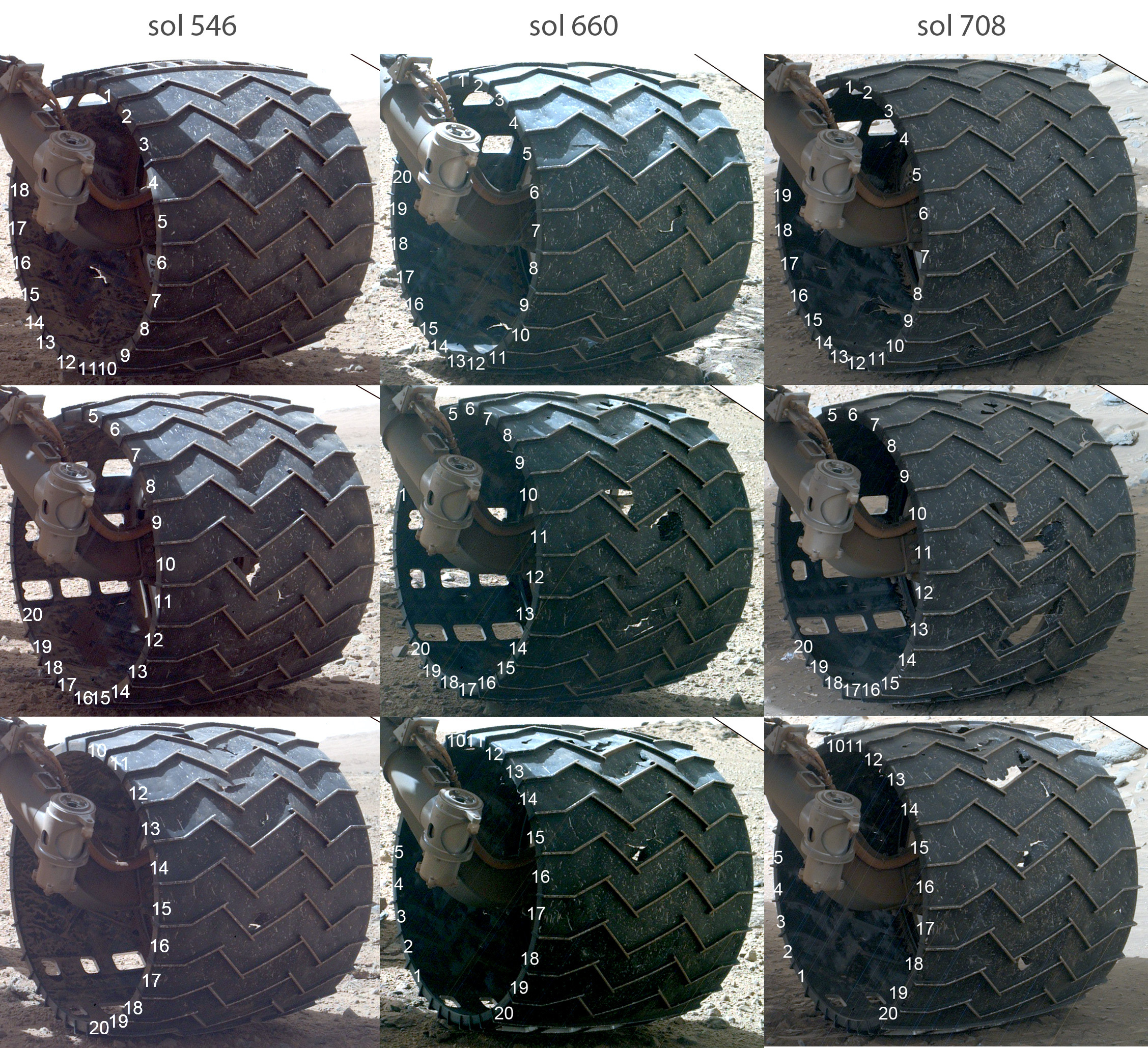
Below is a recent survey of the damage to the wheels. The damage takes three main forms: dents; punctures, where it looks like something just poked a hole through the skin; and tears. Compare this image to an earlier survey to see how the damage has developed over time.
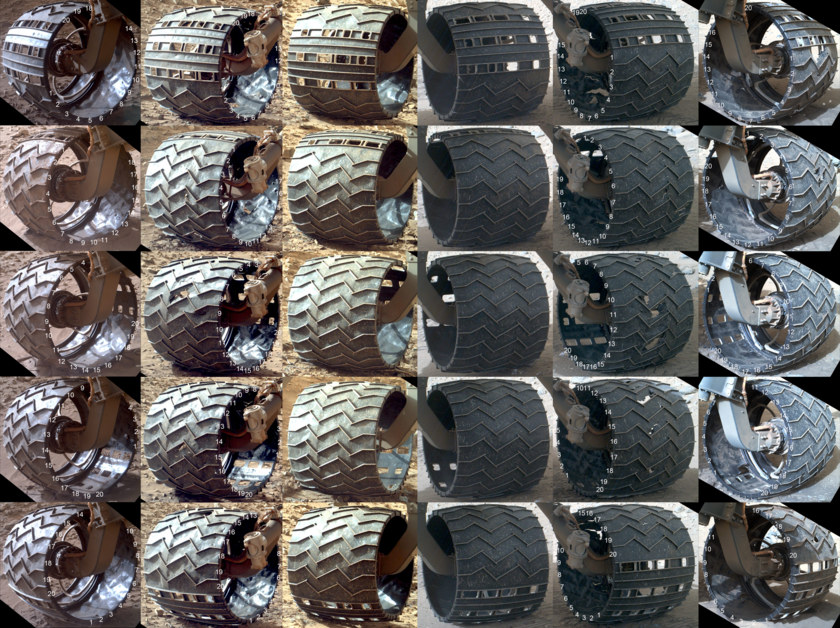
NASA / JPL / MSSS / Emily Lakdawalla
On sol 708 (August 3, 2014), Curiosity performed a series of short drives followed by MAHLI imaging of each of the wheels, to survey their condition. Here, the images have been sorted and the inter-cleat spaces numbered to make it easier to survey the locations of specific marks, tears, and punctures.
Currently, the most-damaged wheel is the left-middle one. Here’s a close look at the development of the damage to the left-middle wheel over time.
NASA / JPL / MAHLI / Emily Lakdawalla
Inter-tread spaces are numbered the same from image to image to help orient you to the locations of holes in the thin metal skin separating the grousers or treads. As of sol 708, the left-middle wheel is the one that has suffered the most damage.
Here is what I see in the patterns of damage:
- The two rear wheels have scratches and dents but no holes that I can see anywhere (except for the odometry markings).
- On middle and front wheels, most (but not all) of the big holes are in the center section of the wheel — that is, they are on the “crown.”
- In some places, punctures and rips have coalesced to open very large holes.
- As far as I can tell, all of the skin that used to fill these holes is still attached and is projecting inside the tire.
- Rips tend to cluster at the tips of the chevron features.
- But there is virtually no damage to the skin inside the odometry markings, where grousers are closer together.
- There are no broken grousers and no sign of any damage (other than scrapes) to any of the stiffening rims.
- Even on the most-damaged wheels, you can clearly see from the outside where the stiffening ring is located, about a third of the way in from the outer edge. That stiffening ring is a locus of undamaged wheel: there is no obvious damage to the skin across this ring.
- There is no overall change in shape to any of the wheels.
2. What is causing the damage to the wheels?
Initially, this was a mystery. The mission did expect some damage to the wheels. The wheels acquired dings and scratches over time, but they were relatively unscathed until that first large puncture appeared on sol 411. They didn’t look at the wheels again until sol 463, when a large rip had opened. At a JPL event in honour of the second anniversary of landing, the moderator asked rover driver Matt Heverly which was the worst sol of the mission for him, and he said 463. “When we saw these images, we saw a hole that was much larger than we had expected. This did not match anything we had seen in our tests. We didn’t know what was causing it. We didn’t know if it was going to continue.” That was the moment, he said, that he knew that their driving was going to have to change radically. But how? They couldn’t figure it out until they started testing.
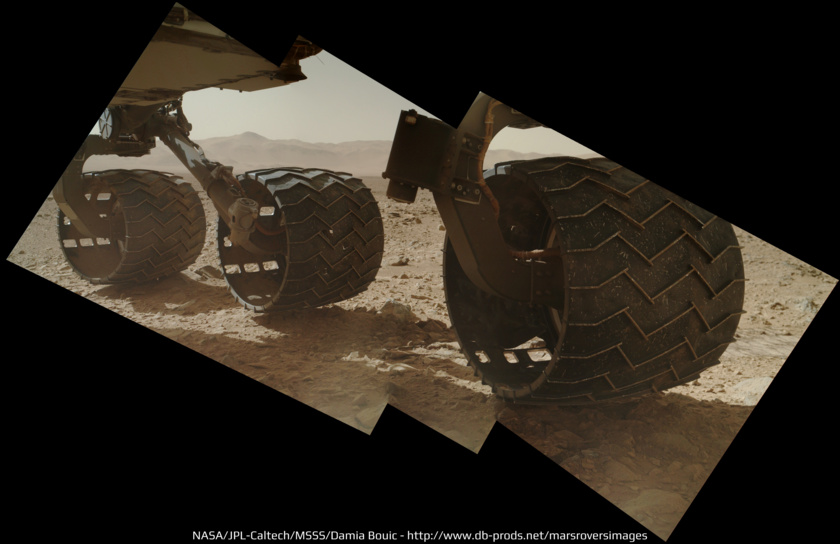
NASA / JPL / MSSS / Damia Bouic
Curiosity took these photos of her wheels with the MAHLI arm-mounted camera on sol 463 (November 24, 2013) A large rip has appeared above the Morse-code holes in the left front wheel. Several smaller punch-holes are visible in it and the middle wheel in this view.
They have been doing testing on both Earth and Mars for a year now. I won’t go into the details of the testing here because I don’t want this post to be 10,000 words long. (For the full story on testing you’ll have to wait for my book.) They traced the damage to two problems, one causing the rips and one causing the punctures.
The tears result from fatigue. You know how if you bend a metal paper clip back and forth repeatedly, it eventually snaps? Well, when the wheels are driving over a very hard rock surface — one with no sand — the thin skin of the wheels repeatedly bends. The wheels were designed to bend quite a lot, and return to their original shape. But the repeated bending and straightening is fatiguing the skin, causing it to fracture in a brittle way. The bending doesn’t happen (or doesn’t happen as much) if the ground gives way under the rover’s weight, as it does if it’s got the slightest coating of sand on top of rock. It only happens when the ground is utterly impervious to the rover’s weight — hard bedrock. The stresses from metal fatigue are highest near the tips of the chevron features, and indeed a lot of tears seem to initiate close to the chevron features.
The punctures result from pointy rocks — sort of. I’ve heard a lot of snarky comments from people about what a surprise it is that there are pointy rocks on Mars. (Not.) Obviously, the presence of rocks on Mars was no surprise to the Curiosity team; the wheels were tested on rocks and did fine. The presence of a pointy rock alone is not sufficient to puncture a wheel. You will regularly see images of the wheels where a wheel is perched on top of a pretty pointy rock, and the wheel skin has no problem resisting the force of that pointy rock. Another clue that pointy rocks alone are not the problem is that the rear wheels have no punctures, even though the weight of the rover is balanced evenly among the six wheels. Something else has to be going on.
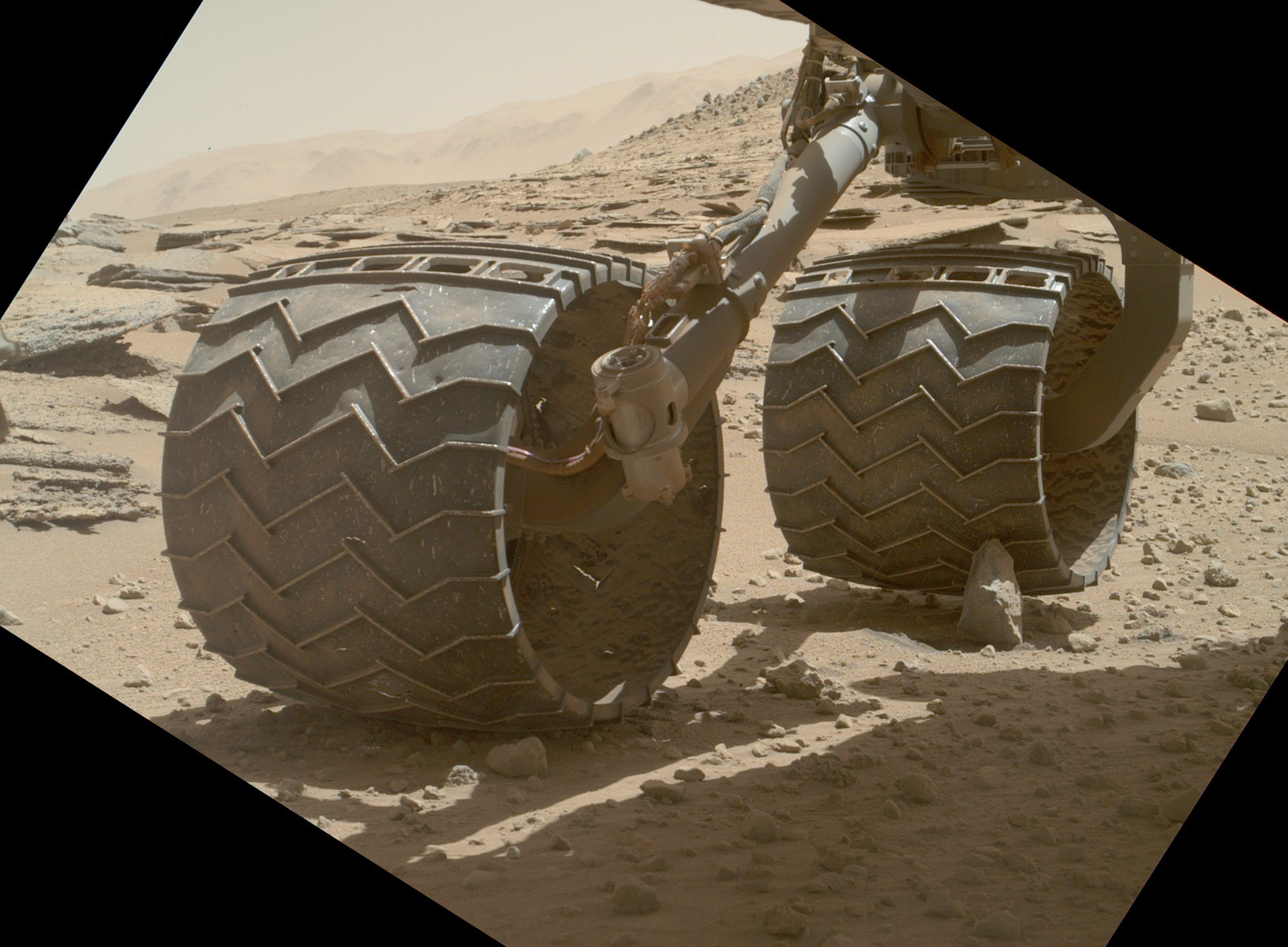
NASA / JPL / MSSS
A routine wheel survey on sol 631 found the right rear wheel perched atop a spike-shaped rock firmly embedded in the ground. The wheel’s weight is entirely supported on the rock spire, yet the wheel was not punctured.
It turns out that there are mechanical aspects of the mobility system that actively shove the wheels into pointy rocks. A wheel can resist the force of one-sixth of the rover’s weight pressing down on a pointy rock, but it can’t resist the rover’s weight plus the force imparted by five other wheels shoving the sixth wheel into a pointy rock. The forces are worse for the middle and front wheels than they are for the rear wheels. If you look at the design of the rocker-bogie system, you can see that the arms that support the middle and front wheels are angled downward. If a front or middle wheel hangs up on a rock and the rest of the rover keeps driving, the arm is exerting a downward force on the wheel. But the rear wheel doesn’t experience that same downward force — it’s dragged behind the arm, like a wheeled suitcase.
Again, though, these forces were understood before Curiosity launched to Mars, and are not, on their own, enough to cause the large punctures. If the pointy rock can move, all that pushing force behind it will just shift the pointy rock to one side or another, or it can roll beneath the wheel, and the wheel will get over it without damage. The key to wheel punctures is immobilepointy rocks. If the pointy rock is stuck in place, partially buried, or if it is a pointy bit of intact bedrock, then there’s nowhere for it to go. At the landing anniversary event, rover driver Matt Heverly showed a video of a test where they had a sharpened metal spike embedded in the ground, and drove a wheel over it. The spike pierced the wheel like a can opener slices into a can. The entire audience sucked in its teeth.
No place we’ve ever been on Mars before has these kinds of embedded, pointy rocks. “To the layman, it all looks the same, but it’s not,” Erickson told me. “There is very hard rock that doesn’t erode away uniformly. And you get ventifacts [wind-eroded pyramidal rocks] that are sharper than we’d like, and that are cemented into the ground. And so when you drive over them, they don’t skitter out of the way, they don’t get pressed into the sand, they just are something that you have to have the wheel go up and over. [The damage rate] got significantly worse towards middle or end of November….unfortunately, we had driven into an area that was full of these rocks.”
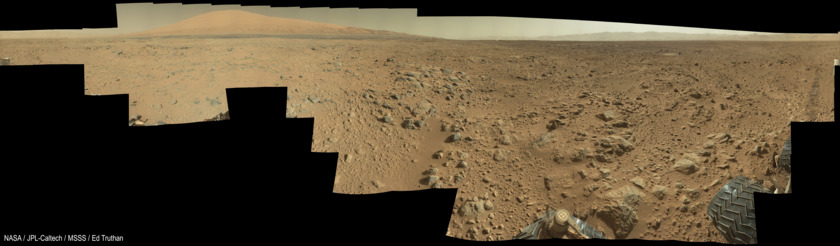
NASA / JPL / MSSS / Ed Truthan
Pointy rocks embedded in sand proved hazardous to the health of Curiosity’s wheels.
3. What is the expected lifetime of the wheels, and how does that life end?
Both of the causes of wheel damage are exacerbated by driving over hard bedrock with pointy protrusions. Erickson told me that when they tested the lifetime of the wheels over this kind of substrate, the news wasn’t good. “The really bad stuff, it only takes 8 kilometers or so and you can destroy the wheel.” What does a “destroyed” wheel look like? You can see one in a video that I posted in my blog entry on Curiosity Women’s Day, where Amanda Steffy explains her work as a member of the mechanical wheel wear tiger team. In the video, she holds up a wheel that she says has been tested all the way to failure:

NASA / JPL
Curiosity engineer Amanda Steffy holds a wheel that has been tested in JPL’s Mars Yard with the equivalent of many kilometers of driving over damaging terrain. This wheel has been tested to failure. It would still function as a wheel, but the sharp edges on the broken parts of the wheel skin could scrape other wheel structures, including a cable bundle that runs across the top of the wheel. Stills from this video.
You can see that the damage is concentrated in the center of the wheel, as is happening on Mars. But on this wheel, all of the grousers have snapped at the point that they meet the structural stiffening ring, cutting the wheel almost completely around its circumference. A large strip of wheel tread is almost completely detached from the wheel — it’s only hanging on by a thread at the inner rim. Only the outer third of the wheel is still attached to the stiffening ring and the rest of the rover.
It’s a terrifying image, and yet the odometry marker has not suffered any obvious damage, and the entire stiffening ring (which is where the wheel actually attaches to the hub) is intact. To my eyes, it looks like it could still function as a wheel. I asked Erickson if the rover could still keep driving with a wheel in this condition. He said, yes, it could. But there’s a catch: “When it’s flapping back and forth as it drives…it has the potential to be scraping the structure, and there is a cable that goes to the wheel motors, both drive and turn, that runs along that support strut. And if this thing starts rubbing against those cables, bad things can happen. You can get short [circuits]. If the right set of things were shorted together, it could go back into the drive controller and damage that, which controls things other than one particular wheel: the antenna, the HGA and all the other parts that move or turn.” Which sounds exactly how China’s Yutu rover failed on the Moon. That would be bad.
The good news is that a better choice of terrain can substantially prolong expected wheel lifetime. Erickson told me that they tested wheels on a wide variety of terrains, and came up with the following lifetimes. Keep in mind that these are conservative estimates, because there were no rover drivers working to steer around pointy rocks — this assumes blind driving over all the worst rocks.
- Bedrock with lots of rocks: ~8 kilometers
- Lots of rocks, not on bedrock: 13-14 kilometers
- Bedrock with few rocks (think flagstones): 30-40 kilometers or more
- Smooth or sandy, with few or no rocks: indeterminate (causes no damage)
No matter the damage to the wheels, they continued to function just about as well over all kinds of terrain as pristine wheels do, until a large number of grousers started breaking. (No grousers have broken on Mars yet.) Accumulating damage will not have a significant effect on the ability of the rover to traverse any type of Martian terrain — even sand — for some time.
4. How can they prolong the life of the wheels?
They can’t go to Mars and switch out the wheels. Fortunately, they have identified several ways to reduce the rate at which the wheels accumulate damage.
Driving more judiciously. Rover drivers are avoiding every pointy rock they can steer around. This only helps in the first 10 or 20 meters of a drive, where they can see smaller potentially hazardous rocks. On hazardous terrain, performing shorter drives allows them to avoid many potentially wheel-damaging rocks.
Driving backwards. When they turn the rover around, the rover’s middle and front wheels are dragged behind their supporting arms rather than being shoved forward. And the angle of the bogie arm that holds the rover’s rear wheel is such that it does not experience the same kind of downward forces that the front and middle wheels do when the rover is driving forwards. Heverly showed a video, taken in the JPL Mars Yard, of a test wheel being driven over the sharpened metal spike with the rover driving backwards, and the wheel was only dented, not punctured.
There is a cost to driving backwards. At the end of each drive, they have to face forwards in order to acquire images of the path ahead for planning. They can’t take those images while facing backwards, because the RTG and antennas on the rover’s rear deck obscure the view from the cameras on the mast. So to drive backwards, they have to turn in place, then drive, then turn in place again. Each turn in place puts about 6 meters on the rover’s wheels, or 12 meters for the drive. For short drives (which is what they do in bad terrain), this can swiftly add up. The drivers have to weigh the cost of increasing drive distance against the potential savings to the wheels of driving backwards. Driving backwards therefore is most valuable on long “blind” drives where the drivers aren’t steering around smaller rocks.
Long-term planning of drive routes that primarily traverse smooth or sandy terrain.Because wheel damage does not occur when traversing sand, the mission is now planning drive routes that cross sandy terrain. Over the past several months, mission geologists have used not only high-resolution photos but also spectral data from CRISM and thermal inertia data from THEMIS to develop maps of the different surfaces along the region between Curiosity and Murray buttes. They have compared their terrain types mapped from orbit to patterns of wheel wear observed on the surface, and identified specific terrain types that pose the least risk to the rover wheels. Then the scientists sit with the rover planners to help the rover planners choose routes that will aim Curiosity’s future path toward more benign terrain.
They applied these methods to the path between the Kimberley and Hidden Valley, and have demonstrated that scientists can successfully use orbital data to predict the hazard that observed terrain types pose to the wheels. They have also demonstrated that they consistently overpredict the hazard — that is, their hazard estimates are conservative. For instance, Erickson told me that some “red” terrain that they have traversed (the worst kind, bedrock plus lots of rocks) has turned out to have rocks spaced far enough apart that rover drivers can steer around them, mitigating the hazard. It’s a spectacular collaboration between scientists and engineers. With judicious terrain choice, Erickson suggested they could go 30 to 50 kilometers before experiencing wheel failure. And the higher proportion of the time spent on sand, the better. You can see why it’s worth attempting to cross sandy terrain like that in Hidden Valley, even if they experience some wheel slip — that kind of terrain is “free” in terms of wheel wear. Erickson was confident, based upon the work done to date, that Curiosity could complete its first mission extension without wheel failure even if they drove on the worst possible terrain. By being choosy about terrain, they can survive significantly longer than that.
Changing driving software to reduce the forces experienced by wheels hanging up on pointy rocks. This one has not been implemented yet, but Erickson told me they are trying to develop and test some software fixes in time for the next rover software update, scheduled for December or January. The rover can sense wheel currents, so it can sense when a wheel is sticking. Also, the damage may be exacerbated by the fact that the software requires all six wheels to rotate at a constant rate, even though a wheel climbing an obstacle has a longer path to travel than one traversing flat ground. By implementing a “smart controller” on the wheel current and allowing wheel rotation rates to vary intelligently in response to sensed conditions, they might be able to mitigate the damage.
NASA has a long history of rewriting software to enable deep spacecraft to do things they couldn’t previously do; Erickson worked on Galileo and all the software development that was needed to salvage the mission after its high-gain antenna failed. But Curiosity, Erickson said, is much more reprogrammable than previous missions, really a “software-defined spacecraft.” He said “There are lots of things we can change in software, particularly anything to do with controlling motors.” The flexibility of Curiosity’s software has sometimes been a problem, of course, because it adds to the mission’s complexity. “The more complicated the software, the more likely you’ll not get everything perfect. You’ll get surprises. Both in development/test and in operations. Even how it responded to the flash failure on sol 200 was a surprise, and we continue to get surprised.” But this is a situation where the flexibility will help, allowing them to redesign the way the rover works in response to a potentially mission-ending hazard that they never anticipated.
5. Why didn’t they foresee this problem?
There were several factors that drove them to design the wheels to be as lightweight as possible. The large size of the wheels means that very slight design changes add a substantial amount of mass. Increasing wheel thickness by one millimetre would add 10 kilograms to the rover’s total mass. But total system mass wasn’t the only constraint. Erickson explained that a major constraint arose from a tricky moment in the landing sequence, at the moment that the wheels deployed, while the rover was suspended from the bridle underneath the descent stage. The wheels’ sudden drop imparted substantial forces on the mobility system, and keeping wheel mass as light as possible reduced those forces to manageable ones. There were other factors that made it important to keep wheel mass low.
So the wheels needed to be as light as possible while still being able to do their job, but as to their job: “We misunderstood what Mars was,” Erickson said. “Strongly cemented ventifacts are not something that we saw on Mars before.” They designed Curiosity to handle all the challenges that Spirit and Opportunity had experienced, especially sand, which Curiosity traverses substantially better than her predecessors. “This vehicle is able to get itself out of situations that MER couldn’t; it’s got more flotation than MER had by a substantial margin.” They designed Curiosity to handle the sand traps, flat bedrock, and rocks-perched-on-sand landscapes seen by all the previous landers. They just didn’t imagine the possibility of the peculiar and never-before-seen terrain type that they found in Gale crater. “There are [places] on Earth that do have these sharp ventifacts, but we hadn’t seen them on Mars and we didn’t test against them,” Erickson said.
6. What are they changing for Mars 2020?
Erickson did not have specific insight into how the wheel design is being changed for the 2020 mission, because he is not directly involved; but the design is definitely being changed. Erickson said that they had already developed several solutions and are now in the process of trying to identify the best solution.
I personally believe that there’s another way that Mars 2020 can prevent this kind of problem, besides redesigning the wheels. That is: select a landing site where they can reach interesting rock targets inside the landing ellipse, rather than having to rove out of the ellipse in order to find good targets. Given that Curiosity only exited its landing ellipse at the end of the prime mission, I think that the scientific community that will participate in the Mars 2020 landing site selection will place a higher value on landing sites with in-ellipse science. There were already strong advocates for non-go-to sites in the Curiosity landing site selection process; they will feel vindicated and emboldened by Curiosity’s challenges. It would limit the landing site choices, and I’m sure there will be a lot of debate about the scientific trade-offs. But, thanks to the work of the four modern Mars orbiters, we know much more about Mars than we did when Curiosity’s landing sites were being selected, and I believe that the community can locate a compelling landing site for Mars 2020 that will not require quite so much driving to reach the rocks of interest.
At the end, I asked Erickson to put the wheel problem into context with his experience on many other missions. He said that the problem of damage to Curiosity’s wheels has definitely had a significant impact on the mission, and mentioned for comparison the wheel failure on Spirit, when they had to start dragging the right front wheel behind them and drive exclusively backwards. But the Curiosity problem is not as bad as Spirit’s because Curiosity is no less mobile than it was before. They can choose to accept wheel damage if they determine the scientific value to be worth it. So while Spirit’s mobility problems limited the scope of what the rover could do, Curiosity’s mobility problems do not — at least, not directly. The biggest effect of the wheel damage problem is to slow the mission down. And that’s what will limit how much Curiosity accomplishes. By not travelling as fast, and by having to limit their path choices, the amount of exploration that they can do is necessarily less than if they could go gallivanting across the bedrock outcrops at will.
The slowed pace of the mission is frustrating, but that’s the way it is. The good news is that the mission went from being surprised and dismayed by unexplained damage, to a full understanding of what’s causing the damage, and of what they have to do to prevent the wheel damage from prematurely bringing the mission to an end. “It’s just one of these cases where Mars is going to give us a new deal, and we’re going to have to play the cards we get, not the ones we want,” Erickson said. The slowed pace has delayed their arrival at Mount Sharp, but they will get there, and the science will be good, Erickson said. “Our whole goal in life is to bring a set of instruments to the good stuff. Right now we’re driving from restaurant to restaurant. But we’re about to get to a smorgasbord. We’ve got a lot of things to pick from there. Instead of driving from place to place, we’re going to hunker down and start pigging out.” We can look forward to much more drilling — and much more in-situ science — once Curiosity’s tender wheels finally bring her to the rocks of Mount Sharp.
We may already be there. Curiosity is drilling this week, into a rock that the mission’s geologists have mapped as one that may be part of the basal units of Mount Sharp. If so, it would be the first such rock that Curiosity has seen — and the beginning of the science that specifically brought Curiosity to the landing site in Gale crater.
This post was written by Emily Lakdawalla and first appeared on The Planetary Society website. It is republished with kind permission.